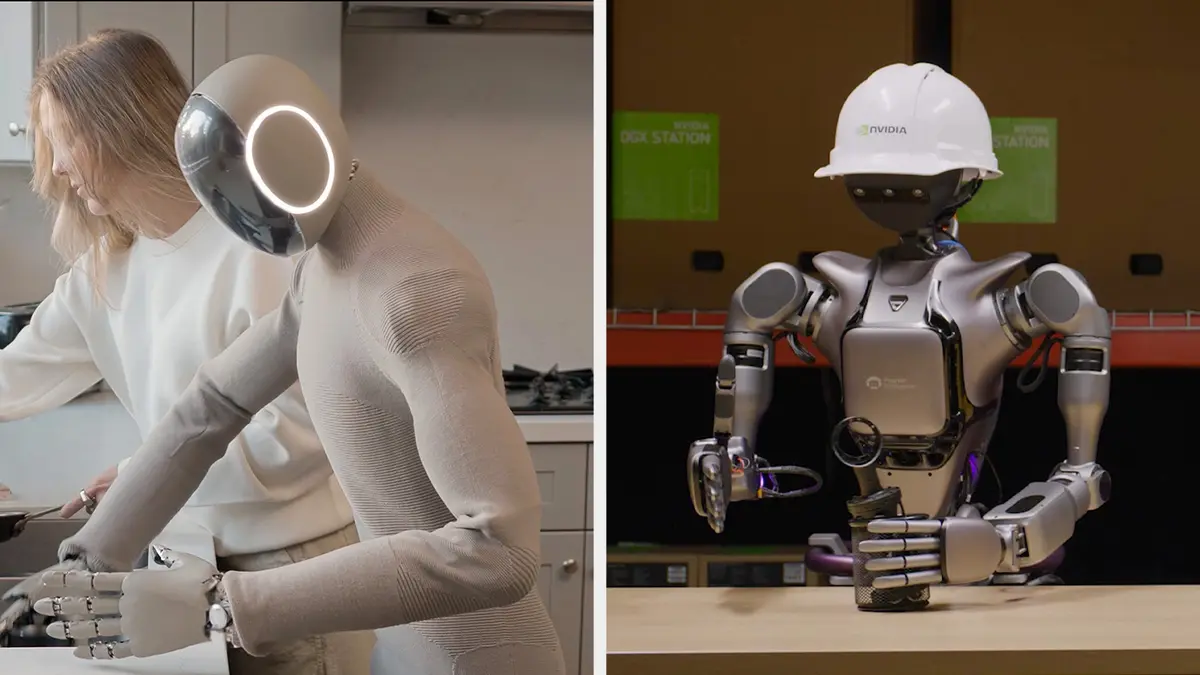
NVIDIA a présenté lors de la GTC 2025, Isaac GR00T N1, un modèle dit fondamental conçu pour la robotique humanoïde. Ce modèle open-source a pour objectif d’améliorer l’autonomie et les capacités des robots en leur permettant d’interpréter leur environnement et d’exécuter des tâches complexes. Il s’accompagne d’outils de simulation et de génération de données pour faciliter son adoption.
Un modèle conçu pour la robotique humanoïde
Isaac GR00T N1 repose sur une architecture à deux systèmes, inspirée du fonctionnement cognitif humain. Le premier système, rapide, exécute des actions instinctives, alors que le second analyse l’environnement et planifie les mouvements. Cette approche permet aux robots d’effectuer des gestes précis, comme saisir et manipuler des objets, mais aussi d’exécuter des tâches nécessitant plusieurs étapes.
Le modèle s’appuie sur un mélange de données réelles et synthétiques. Grâce à la plateforme NVIDIA Omniverse, il sera possible de générer des scénarios d’entraînement sans avoir à collecter de vastes ensembles de données réelles. Selon NVIDIA, cela permettrait d’améliorer la fiabilité du modèle tout en réduisant le coût et le temps de développement.
Un moteur physique développé avec Google et… Disney
En parallèle, NVIDIA a annoncé Newton, un moteur physique open-source conçu en collaboration avec Google DeepMind et Disney Research. Ce moteur est optimisé pour la robotique et compatible avec des frameworks de simulation existants comme MuJoCo et NVIDIA Isaac Lab.
Disney prévoit d’exploiter Newton pour améliorer l’animation de ses robots interactifs, en particulier ceux inspirés de l’univers Star Wars. Google DeepMind, de son côté, travaille sur MuJoCo-Warp, une technologie destinée à accélérer l’apprentissage automatique appliqué à la robotique.
Des applications pour plusieurs secteurs
Isaac GR00T N1 pourrait être utilisé dans différents domaines, en particulier la logistique, l’industrie et la santé. NVIDIA a également présenté une version spécifique pour le secteur médical, Isaac for Healthcare, développée en partenariat avec GE HealthCare. Ce programme propose aussi des modèles pré-entraînés et des environnements de simulation pour tester des dispositifs médicaux autonomes.
Des entreprises comme Agility Robotics, Boston Dynamics et NEURA Robotics ont déjà obtenu un accès anticipé à Isaac GR00T N1. NVIDIA met à disposition le modèle et ses outils associés sur des plateformes comme Hugging Face et GitHub, pour faciliter son adoption par les développeurs.
Les données d’entraînement et les scénarios d’évaluation d’Isaac GR00T N1 sont désormais accessibles en open-source. NVIDIA prévoit aussi de proposer un supercalculateur personnel, DGX Spark, pour faciliter l’adaptation du modèle à de nouveaux robots et environnements.
Newton devrait être disponible d’ici la fin de l’année.